

机器人可以在核能领域发挥多种作用,特别是在核电站退役和场地去污方面。最近,机器人领域的一系列新的进展,不仅显示了机器人技术在核能方向的光明前景,而且也为核企业招聘新一代工程师提供了一条思路。
1、核退役

核退役是一个发展势头不断增长领域,全世界439座核反应堆中,有相当一部分电厂接近退役年限。
在全球范围内,有199座动力堆已经关闭,但只有21座完全退役。
国际原子能机构(IAEA)预计,到2030年,2020年的12-25%的核电发电能力都将退役。
虽然现有的退役方法或多或少足以完成这项任务,但随着技术创新不断进步,正在发展更快、更安全、更具成本效益的工作方式。
这其中,数字技术与机器人和无人机相结合,为提高工作效率和降低操作员风险提供了巨大潜力。
2、IAEA核退役调查

今年2月,IAEA对核退役的调查发现,越来越多的国家倾向于立即拆除退役核设施。
IAEA退役和环境修复科科长奥列娜·米科莱丘克(Olena Mykolaichuk)解释说:“以前,许多退役计划选择推迟退役设施的拆除,但现在的全球主要退役战略为,立即拆除设施。”
鉴于最近运行的核电站,与几十年来一直处于关闭状态的核电站相比,活动水平有所增加,这一要求也成为远程技术和机器人技术使用的额外驱动因素。
新兴技术,再加上越来越多地使用机器人和无人机,有可能提供更有效的项目实施和风险降低。
IAEA退役和环境修复科的退役专家泰蒂亚纳基洛奇茨卡(Tetiana Kilochytska)告诉NEI,“退役界越来越多地介绍和讨论机器人技术和远程控制技术的使用。”
作为调查的一部分,IAEA向50多个国家发出了一份全球退役战略调查表,并评估了这些答复,以及来自IAEA动力反应堆信息系统(PRIS)、研究反应堆数据库(RRDB)和综合核燃料循环信息系统(iNFCIS)的数据。
IAEA在三年内还主办了一系列技术会议,来自约20个国家的数十名专家以及经合组织(OECD)和欧洲联盟委员会的核能机构参加了会议,交流经验并提供反馈。

IAEA开发了一种无人机新技术,供日本福岛县在污染地区进行放射性测量。(照片:福岛县)
管理事故现场的国家,如日本,正在使用创新的机器人技术和远程检查工具来定位和表征燃料碎片,以回收和处理这些材料。
3D建模或建筑信息建模(BIM)、虚拟现实和遥控(包括无人机和机器人)等技术也越来越多地应用于设施退役。
这些技术能够更有效地收集、理解、显示和管理数据,从而在拆卸和去污活动的规划和准备过程中可视化不同的场景。
帮助领导IAEA项目的瑞士联邦核安全监察局的汉内斯·汉吉(Hannes Hanggi)说:“将BIM与GPS或位置感知Wifi网络相结合,可以部署半自主或完全自主的机器人系统和无人机,它们有可能大幅降低成本,进一步提高安全性,并提高退役项目的性能。”
3、切尔诺贝利和福岛的教训

帮助清洁切尔诺贝利核电站的Mobot-h-hv专用设备(图源:viacheslav_petrusha)
基洛奇茨卡告诉了NEI,切尔诺贝利和福岛事故如何影响了机器人技术在退役中的使用。
她指出:“在乌克兰,1986年4月切尔诺贝利核电站4号机组发生事故几年后,开展了研究和开发机器人技术的活动,用于受损设施内的不同用途。由于电厂内部的高暴露剂量和放射性气溶胶的浓度,采用机器人技术的方法似乎非常有应用前景,例如,用于描述场所和放射性材料的采样。这将减少参与工人遭受的辐射剂量,并帮助规划进一步的行动。”
然而,这其中也存在着挑战。
机器人无法移动,因为核电厂内部表面结构复杂——大量建筑垃圾,没有移动空间——而且极高的暴露剂量影响了电子设备。
基洛奇茨卡补充说:“如果机器人设备停止工作或卡在装置内部的某个地方,将它们带回来非常困难,有时也很危险。已经有一些机器人因故障无法移动,丢在了切尔诺贝利核电厂内。”
尽管如此,目前已有计划在日本福岛使用机器人设备。
开发福岛用机器人的主要机构是国际核退役研究所(IRID),该研究所于2013年紧急成立,旨在升级和开发福岛第一核电站的退役技术。包括为不同目的开发、测试和使用一系列机器人。
此外,总部位于美国的雅各布斯(Jacobs)设计并制造了一种机器人工具,以获取受损反应堆的关键信息。

使用机器人在福岛核电现场采集样本,以帮助确定退役材料的特性(图源:Jacobs)
它将收集安全壳底部的卵石状碎片。该原型通过了三菱重工(MHI)极其严格的工厂验收和性能测试,MHI是该项目的领导者,预计将建造一个防辐射版本用于部署。
雅各布斯能源、安全与技术高级副总裁凯伦·维梅尔特(Karen Wiemelt)说:“这是我们如何将创新工程和深入的核知识结合起来,帮助退役机构将放射性遗留场地转变为安全场地的一个主要例子。”
机器人必须足够小,才能进入受损的安全壳,并通过桶式回收装置来收集尺寸达10mm的沙子和卵石。
碎片的确切性质目前尚不清楚,对回收碎片样本的检查将为退役的下一步提供关键数据。
试验表明,远程操作员在内置摄像头图像的引导下,将装置插入安全壳并取回碎片样本所需时间不超过8分钟,从而将辐射损伤对装置的影响降至最低。
“日本政府和东京电力公司(TEPCO)计划在2022年底前对福岛第一核电站2号机组反应堆内的燃料碎片进行回收测试。” 基洛奇茨卡说。

日本福岛第一核电站,全副武装的东电员工在存放核燃料棒的燃料池前视察。
“为此,TEPCO一直在与英国合作建造一个机器人手臂,该机器人手臂已经抵达日本。目前正在进行评估测试,一旦完成,它将被放置在一个模拟设施中进行碎片回收培训。此外,各种远程控制设备正在用于监控高剂量区域的情况,如反应堆内部。”
日本原子能机构高级退役科学合作实验室(CLADS)燃料碎片处理部门的Tadahiro Washiya表示,回收燃料碎片是福岛第一核电站退役工作中最具挑战性的部分。
Washiya说:“对受损1号机组[F1]的调查是通过机器人和远程检查工具进行的;然而,在了解燃料碎片的状况方面存在许多不确定性,包括其成分和机械性能。”
俄罗斯圣彼得堡赫洛宾镭研究所(Khlopin Radium Institute)的鲍里斯·布拉科夫(Boris Burakov)说,从1986年切尔诺贝利事故中获得的知识已经支持了福岛第一核电站的工作,2019年10月,该公司与日本专家举办了一次培训研讨会,使用了真实的切尔诺贝利燃料碎片样本。
“切尔诺贝利样本的材料研究结果对于预测福岛第一核电站F1燃料碎片的主要属性非常重要,”布拉科夫说,因为两个地点的燃料碎片有一些相似之处,包括熔岩状物质、熔岩与水接触产生的多孔燃料以及热颗粒与燃料和堆芯基质。
4、吸引专业人才
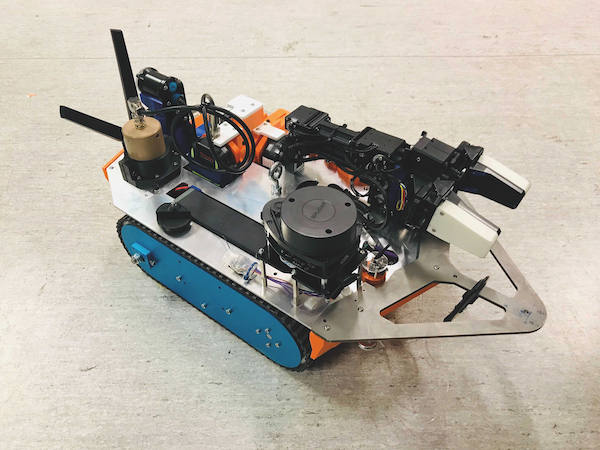
IAEA众包挑战旨在鼓励设计和运营创新,以实现成本效益高、效率高的智能解决方案。
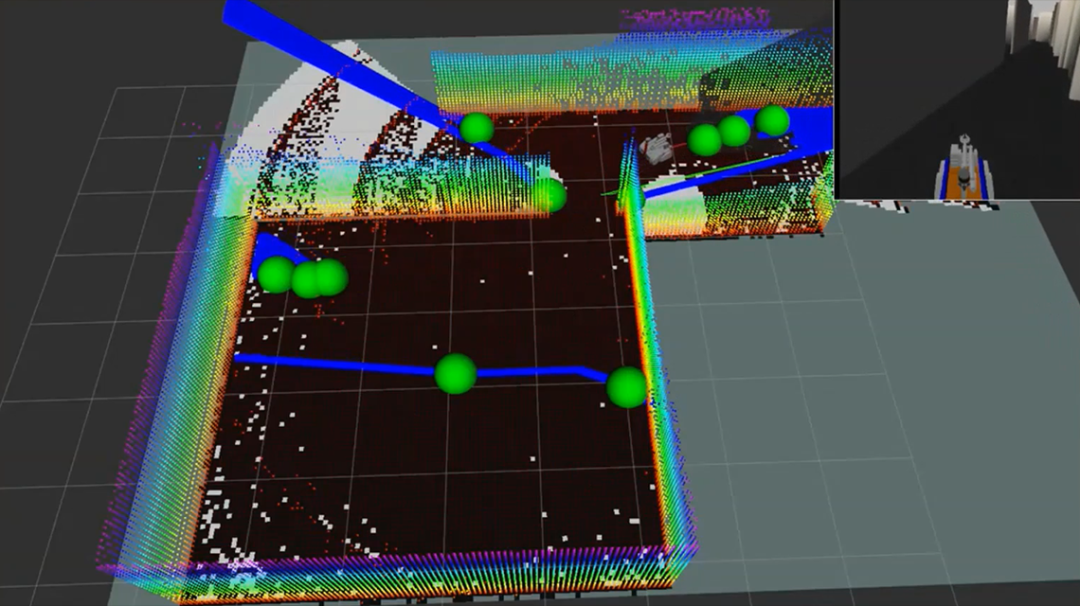
上图:基于机器人平台采集样本的图像处理与人工智能相结合。
由于许多核电站计划在未来几十年内关闭,核工业将需要更多的专业人员从事退役工作。
为了吸引该领域的新人才,2020年,IAEA举办了一次全球众包挑战,从年轻人那里寻求原始概念或项目大纲,以推动核设施退役或放射性污染场地的环境修复。
参赛作品包括特征描述工具包、用于现场测量和收集3D辐射数据的仪器以及机器人和人工智能。
共收到12个国家提交的26份材料,并根据创新和创造力水平等标准进行了评估。
在IAEA选出的五个最佳参赛作品中,有几个依靠机器人技术。例如,印度尼西亚国家核能局(BATAN)的泽尼·安格拉尼(Zeni Anggraini)领导了一个团队,提出了一个机器人的概念,用于污染区域的测绘和监测。
他说:“到目前为止,污染的测量仅限于一个小区域,而且是人工进行的。我们希望制造一种机器人,可以用来避免对工作人员的潜在辐射风险。需要在使用机器人测量和可视化受影响区域污染的辐射监测方法上取得突破。”
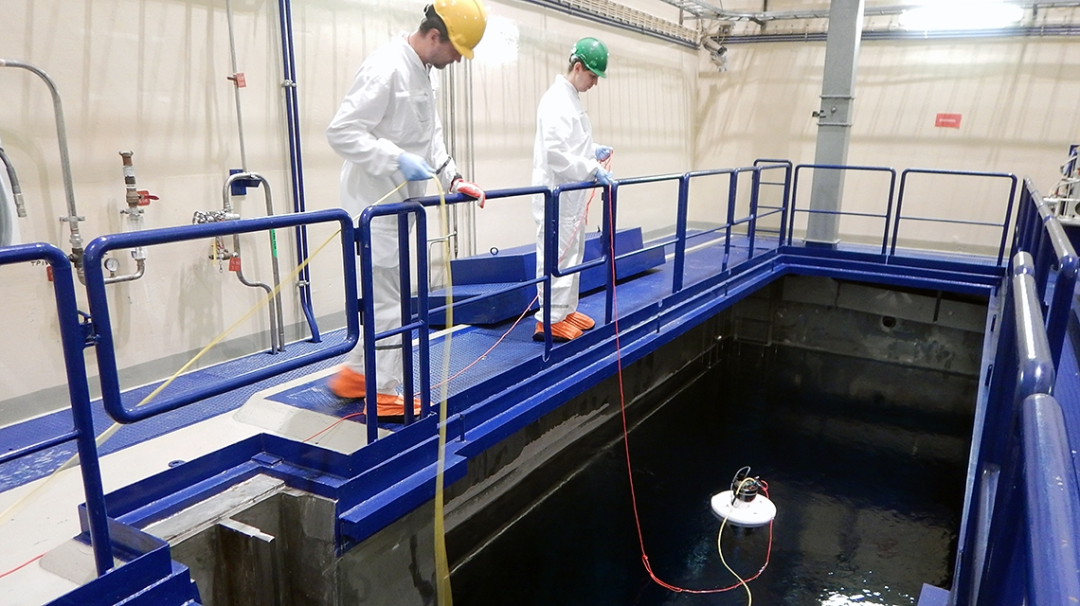
无人水面交通工具的获奖设计在芬兰的洛维萨核电站进行了实际测试。(图源:IAEA)
另一个以机器人为特色的提案来自美国。
美国佛罗里达国际大学的研究助理丹尼尔·马丁(Daniel Martin)说:“随着核工业的发展,对新项目专家的需求越来越高。随着技术在我们的生活中不断发展,对这些领域专家的需求也越来越大,例如机器人技术。”
其团队设想使用机器人平台和人工智能,以帮助防止缺陷发生在待拆除的设施中。
与此同时,英国布里斯托尔大学的博士生艾林霍兰德(Erin Holland)领导的团队提交了加速退役活动的特征描述工具包。
霍兰德说:“核机器人技术是一门快速发展的学科,先进机器人系统的物理演示有助于使人类操作员更快、更安全地完成核退役。”
他补充说:“该项目的总体目标是使旧工厂,如铀和钍矿石加工厂保持在安全辐射范围内。”
5、野外应用

Spot机器狗已经部署在塞拉菲尔德核电现场(图源:MikeDotta)
塞拉菲尔德(Sellafield)核电站是英国最大的核设施,也是其核退役工作的重点,正在越来越多地使用机器人。
Spot这款机器狗于2021年10月在塞拉菲尔德首次亮相,经过三天的成功试用,并在活动区域内进行了转换。
塞拉菲尔德的修复团队与总部位于坎布里亚的工程顾问Createc、英国原子能机构(UKAEA)及其美国制造商波士顿动力公司(Boston Dynamics)合作,领导Spot在塞拉菲尔德有限公司的部署。

波士顿动力公司的SPOT机器人在英国塞拉菲尔德核电现场的部署试验。在这次试验中,
SPOT使用了一台高清摄像机、一个伽马成像系统和一个激光扫描装置。(图源:Sellafield Limited)
利用Createc提供的系统,通过激光扫描和伽马辐射成像收集了有价值的信息。
机器人穿着UKAEA专门设计和制造的防护服完成了工作,该防护服保护机器人免受任何放射性污染。
塞拉菲尔德有限公司修复能力开发经理克里斯·霍普(Chris Hope)表示:“这是一项非常具有挑战性的任务——我们将Spot部署到一个复杂、杂乱、高度污染的地区,任务是捕获信息。我们捕获的数据质量非常高,将帮助我们进行退役和废物规划。”
他补充说:“到目前为止,这种类型的调查依赖于我们的操作员在危险环境中手动部署设备,并穿戴全套防护设备。这证明Spot可以帮助我们人类远离伤害。这使我们能够让工人自由地完成其他增值工作。防护服也发挥了作用——机器人由我们的健康物理团队监控和清理,并且能够离开塞拉菲尔德现场。”
Lyra机器人被用于在敦雷(Dounreay)核电站测量140米长的地下管道(图源:曼彻斯特大学)
在英国其他地方,今年,多恩雷场地恢复有限公司(DSRL)开始与核能机器人和人工智能(RAIN)合作,开发第二代机器人Lyra。
它包括一整套测量措施,包括激光雷达、多角度摄像机、辐射探头以及使用机械臂采集拭子。
今年2月,机器人完成了对一条140米长的地下管道的调查,该管道穿过实验室之间的中央走廊,提供了有助于退役的有用信息。
DSRL项目经理杰森·辛普森(Jason Simpson)说:“现在特征调查已经完成,我们已经对管道有了非常全面的图片分析,这将有助于我们就管道应如何退役做出明智的决定。”

OC Robotics 激光蛇形(LaserSnake)系统一直在英国温弗里思(Winfrith)
核电站DRAGON反应堆的高放射性堆芯上工作(图源:OC Roboteics)
OC Robotics柔性蛇形臂机器人已被部署用于其高功率切割激光器,帮助英国温弗里斯的Dragon反应堆退役。
它穿过堆芯周围3米厚混凝土中的一个狭窄孔,穿过连接在反应堆堆芯上的直径为400mm的吹扫气体预冷却器(PGPC)容器。由OC Robotics和TWI利用NDA的研发资金开发,LaserSnake允许在现有辐射屏蔽内进行工作,节省时间和金钱。
Magnox高级项目经理安迪·菲尔普斯(Andy Philps)说:“我们相信这是激光切割技术首次直接应用于核反应堆的核心。”
2021年,法马通公司确认了用于
处理和分拣高剂量废物成分机器人系统的运行,为提高自动化程度铺平了道路。
由德国联邦教育和研究部资助的虚拟远程机器人(VIRERO)项目开发了拆除和分类高剂量废物、包装放射性废物后处理,以及处理、储存和处置的放射性分类技术。VIRERO项目预计将于2023年底完成。
据Kilochtska称,目前,许多远程控制设备可用于退役期间的表面特征描述,用于拆卸可能受到放射性污染的结构、系统和部件。
“此外,无人机等机器人技术可以调查辐射情况,并测量房屋和房间内的污染水平,”她告诉NEI,“通过这种方式,可以避免工人遭受辐射,并且可以减少进行这些行动(例如,表征或拆卸)所需的时间和资金。与3D建模一起,这使得可以创建特定房间或设施的全貌,从而更容易规划进一步的活动,同时考虑到剂量率和污染水平。”
她指出了未来使用机器人技术的一些要点。
“首先,有必要评估实际需求和潜在效益,同时考虑特定设施退役的特定计划。通常,此类技术的开发需要大量投资。此外,设备的进一步使用需要维护成本,以支持运营和维修(如需要),如有合格的工作人员。“
她补充说,这类设备的去污也可能存在一些问题,“在做出开发或购买设备的决定之前,应提前考虑这些。”
显然,机器人技术和其他数字工具在推进核退役项目方面发挥着越来越重要的作用,不仅使专家能够描述环境和退役挑战,而且还改善了其执行。
IAEA副总干事兼核能部部长米哈伊尔·丘达科夫(Mikhail Chudakov)表示:“创新数字技术可以为退役项目的规划和实施提供重要的见解。它们可以在对人类工人来说困难或危险的退役情况下提供支持,并有助于确保项目安全有效地执行。”
6、IRID机器人突破

国际核退役研究所(IRID)由18家专业研发公司和组织组成,包括:
两个国家研发机构:日本原子能机构;国家先进工业科学技术研究所。
四家工厂制造商:东芝能源系统与解决方案公司;日立GE核能有限公司;三菱重工有限公司;阿托克斯(ATOX)有限公司。
12家电力公司:北海道电力公司;东北电力公司;东京电力公司(TEPCO)控股公司;中部电力公司;北陆电力公司;关西电力公司;中央电力公司;四国电力公司;九州电力公司;日本原子能公司;电力发展有限公司;日本核燃料有限公司。
由于高辐射水平,福岛第一核电站的许多区域仍然太危险,人类无法进入,机器人被用于执行一些退役工作。IRID开发了机器人,用于调查主安全壳(PCV)内的情况和燃料碎片的扩散。
已经引入了各种类型的机器人。
最早的两个机器人——Rosemary和“樱花”——在1号机组反应堆厂房内共同检查放射源。这两种机器人都是由位于习志野市的千叶理工学院(CIT)开发。IRID(日立GE)后来对其进行了修改,以调查建筑物内的剂量率。
Rosemary配备了英国制造的伽玛相机(N-Visage),用于检测辐射剂量率。
Rosemary通过无线系统操作该摄像机,因为不够大,无法配备通信电缆。然而,由于在建筑物内难以维持无线通信。“樱花”支持Rosemary作为无线传输站。
2014年,MHI测试了MEISTeR(远程控制的维护设备集成系统)机器人,该机器人随后完成了1号和2号机组的去污工作和混凝土芯样取样。
MEISTeR能够进行混凝土钻孔、切割扶手和管道、清除障碍物、去污和维修工作等。岩芯样本的采集使用了一个MEISTeR臂上配备的岩芯钻孔设备,另一个臂上配备了凿子。
同样在2014年,日立GE核能公司开发的游泳机器人和爬行机器人在2号机组环面室内进行了状态检查和流量检测调查。
机器人在水下游泳,使用摄像机检查渗透点,并使用示踪器检查流量,而爬行机器人使用超声波声纳系统测量和监测示踪器的流量。
次年的调查是在1号机组PCV上进行的,使用的是日立GE核能公司开发的两个变形机器人。
开发团队进行了许多修改和改进,使机器人能够承受反应堆内的高辐射环境。
可变形状机器人首先采用管状形式穿过狭窄管道,以到达安全壳内部。随后为了实现稳定性,机器人在收集安全壳内部条件的必要信息时变成U形。
免责声明:本网转载自合作媒体、机构或其他网站的信息,登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性。本网所有信息仅供参考,不做交易和服务的根据。本网内容如有侵权或其它问题请及时告之,本网将及时修改或删除。凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。


